
ARI wiki ROS simulator: how to get started
Starting with the ARI ROS simulator Did you know that it’s possible to practice programming with wiki ROS without having…

Introducing: ARI ROS Simulator
Eager to program with our latest Social Robot, ARI? ARI robot’s simulation is open source and is available online with…
TIAGo robot ROS Tutorial 4: OpenCV
What is OpenCV? Eager to program robotics applications? TIAGo robot’s simulation is open source and is available online: even if you…
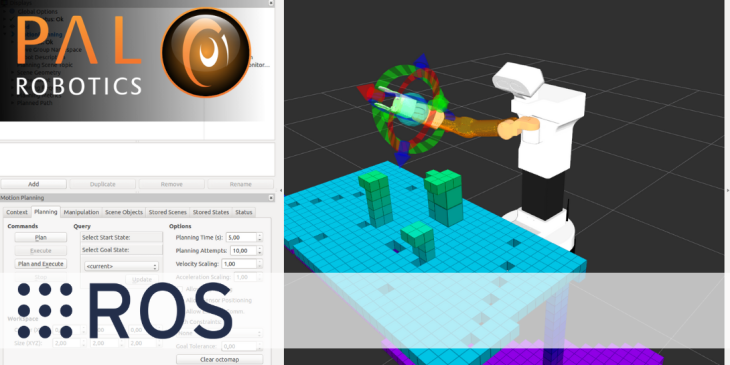
TIAGo ROS Tutorial 3 – MoveIt!
What is MoveIt! There’s no need to have a robot to start developing applications for it! TIAGo, as all our…
The intern guide to SLAM part II: loop closure & new framework
Next up in our SLAM series is intern Tessa Pannen, who is studying a Computational Engineering Science MA at the…

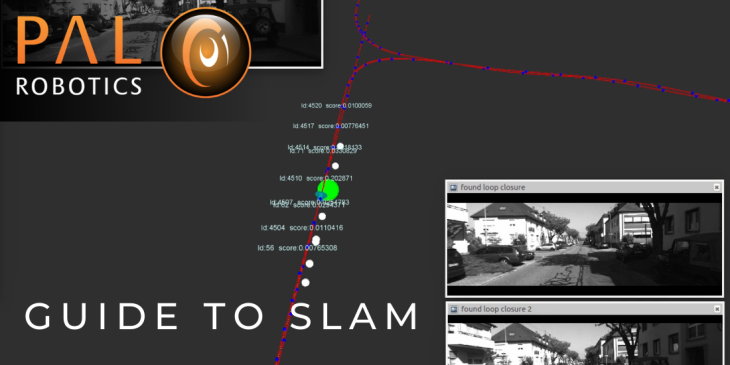
The definitive intern guide to SLAM: place recognition & loop closure
SLAM – simultaneous localisation and mapping – is a technique robots use to build a map of their environment, ascertain…

TIAGo ROS Simulation Tutorial 2 – Autonomous robot navigation
Autonomous robotic navigation with TIAGo robot ROS Simulation Tutorial The second pack of open-source ROS tutorials for TIAGo’s simulation in…

TIAGo ROS Simulation Tutorial 1 – How to control the cobot?
TIAGo’s ROS open tutorials for its open-source simulation in the Gazebo start with TIAGo’s control. This collaborative robot is open…