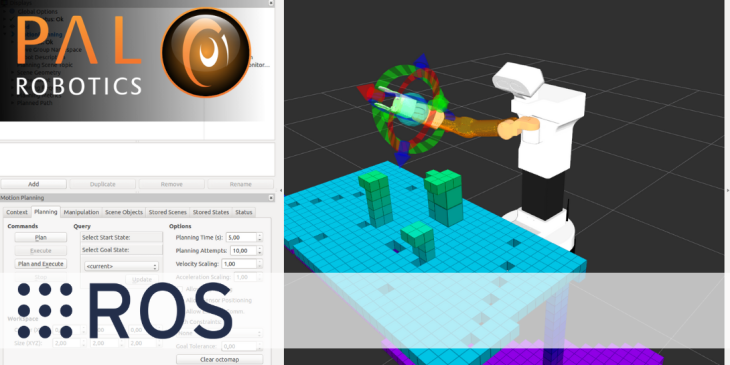
TIAGo ROS Tutorial 3 – MoveIt!
What is MoveIt! There’s no need to have a robot to start developing applications for it! TIAGo, as all our…

INBOTS: Building bridges between robots, businesses and society
Project INBOTS: embracing robotics in everyday life As robots’ skills are amazingly skyrocketing at the technical level, our imagination flies…

A rewarding European Robotics League tournament, at PAL Robotics
ERL: An enriching experience that boosts research Five teams from different European universities competed in Barcelona in a thrilling European…

Celebrating a remarkable European Robotics Week!
The European Robotics League at PAL Robotics! The European robotics community celebrated its Robotics Week (ERW) from 17th to 26th…

IEEE Humanoids 2017, the future of humanoid robots at Birmingham
Where to find us at Humanoids 2017 This November is an exciting month for us and for our robots! It…

Co4Robots: diverse robots, united as one team
Co4Robots: many robots, one team Over the last years, the robotics market has been filled with many new models of…

ROSCon & IROS: Thank you, Vancouver!
PAL Robotics’ software developments and TALOS Space Robotics Challenge This year ROSCon 2017 consolidated more than ever as the landmark…

SocSMCs: making robots interact without words
When we shake hands with someone or help them moving furniture, our body is calculating much more than we know,…