TALOS
Your 1.75 meter pal in research
A walking biped robot capable of lifting objects up to 6 kg with one arm fully extended. It is completely configurable, thanks to being fully developed in ROS.
TALOS
A walking biped robot capable of lifting objects up to 6 kg with one arm fully extended. It is completely configurable, thanks to being fully developed in ROS.
Ensuring seamless interactions in dynamic environments.
Facilitating dynamic motion in real-time.

Used globally in top labs driving robotics, AI, and human-centered tech
head and gripper for your needs.
Features

Features

Features

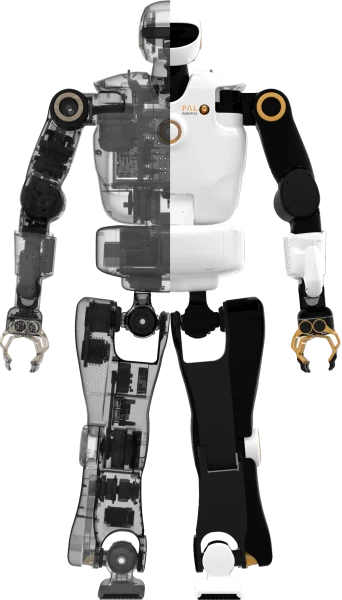
Technical
SPECS
| Height | 175 cm |
|---|---|
| Weight | 95 kg |
| Arm Payload | 6 Kg (arm stretched) |
| Battery autonomy | 1,5h (walking) / 3h (stand-by) |
| Head and Gripper | Fully customizable |
| Torque sensors | Full Toque sensors feedback in all joints* |
| *Except head, wrists and grippers | |
| OS | Ubuntu LTS, Real Time OS |
OPEN SOURCE
Simulation model available at: http://wiki.ros.org/Robots/TALOS
PREMIUM SOFTWARE
Speed your research with extra software: from Whole-Body Control to navigation, HRI skills or teleoperation.


Watch
TALOS



Get to know how to work closer with TALOS.