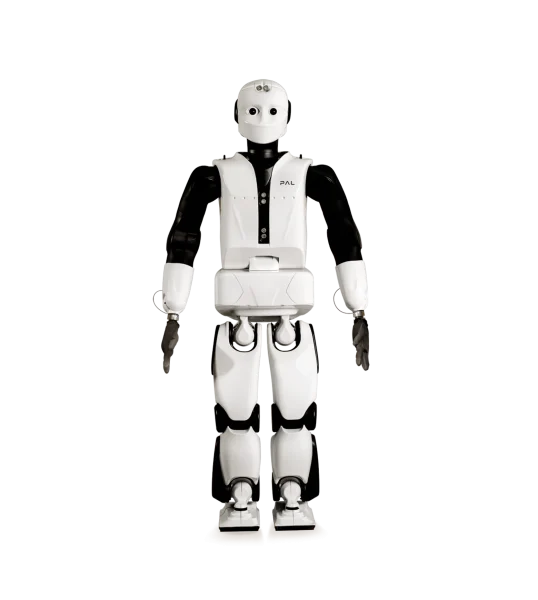
REEM-C
Un humanoide robusto
REEM-C es capaz de caminar de forma estable a una velocidad punta de 2,5 km/h, e incluso puede subir escaleras o sentarse en una silla. Dotado de una gran autonomía, es el robot bípedo que introduce investigación en robótica e Inteligencia Artificial.