HUMANOIDES
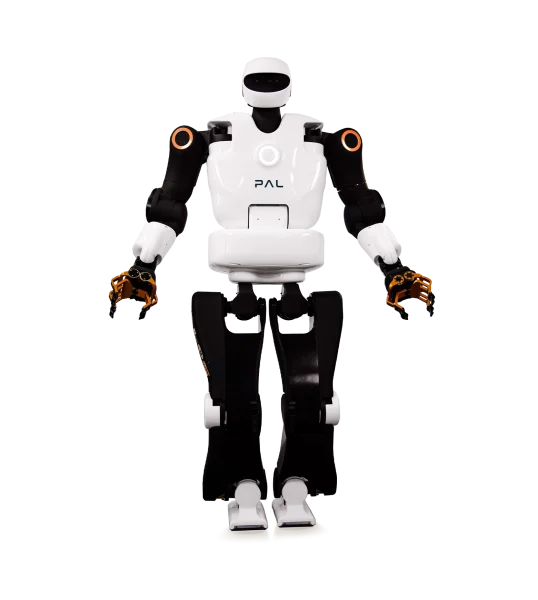
TALOS
Impulsa tu investigación con TALOS, el robot humanoide pensado para el futuro
TALOS
Tu compañero de investigación de 1,75 metros
Un robot bípedo que te ayuda con objetos de hasta 6 kg con cada brazo, mientras está estirado. Configurable gracias a estar desarrollado íntegramente en ROS.