TALOS
Your 1.75 meter pal in research
A walking biped robot capable of lifting objects up to 6 kg with one arm fully extended. It is completely configurable, thanks to being fully developed in ROS.
Compliant
Ensuring seamless interactions in dynamic environments.
Reactive
Facilitating dynamic motion in real-time.
Functional
Focused on industrial applications.
Customizable
head and gripper for your needs.
Features
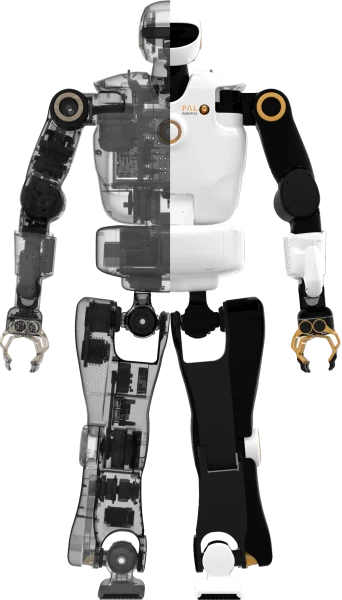
Torque control
TALOS is fully torque-controllable thanks to the torque sensor feedback in all joints, which enables powerful sensing and multi-contact motions.
Contact Us 
Features
EtherCAT Network
TALOS’ EtherCAT communication network allows to run control loops at 2 kHz, and up to 5 kHz, which enables TALOS to have highly reactive and dynamic motions.

Features
6kg Payload per arm
TALOS has a payload of 6 Kg with each arm fully extended, as it was designed having in mind the use of heavy industrial tools. This enables our walking biped humanoid robot to effectively perform tasks in various environments such as the Factory of the Future.

Technical
Specifications
SPECS
| Height | 175 cm |
|---|---|
| Weight | 95 kg |
| Arm Payload | 6 Kg (arm stretched) |
| Battery autonomy | 1,5h (walking) / 3h (stand-by) |
| Mounting points | On head, laptop tray and mobile base |
| Head and Gripper | Fully customizable |
| Torque sensors | Full Toque sensors feedback in all joints* |
| *Except head, wrists and grippers | |
| OS | Ubuntu LTS, Real Time OS |
OPEN SOURCE
Simulation model available at: http://wiki.ros.org/Robots/TALOS
PREMIUM SOFTWARE
Speed your research with extra software: from Whole-Body Control to navigation, HRI skills or teleoperation.


Whole Body Control
A controller written in the ros_control framework developed by PAL Robotics that allows the user to solve a problem consisting of tasks and constraints ordered by priority.
Watch
TALOS in action
TALOS
News

TALOS research: torque-controlled locomotion for humanoids in unknown environments
In recent research the team at PAL Robotics and our French partners, TOWARD and Dynamograde lab, using a new framework,…

MEMMO: Giving memories to robots for a better motion generation
Preparing TALOS humanoid for working at Airbus Avoiding obstacles or interacting with a dynamic environment can still be a challenge…

The latest in humanoid robots: TALOS, Memmo & Humanoids 2020
Humanoids 2020: the latest news from the conference Last week we participated in The IEEE-RAS International Conference on Humanoid Robots…
Frequently Asked Questions
Get to know how to work closer with TALOS.
TALOS’ Torque control has a low latency of 2kHz.
We provide a state estimation from IMU+kinematics out-of-the-box, a system for fusing this odometry with additional external measurements should be tackled with an additional estimator out of the real-time ros_control loop. This would be safer for the whole body torque control that relies on the CoM estimation.
Via ros_control, you have access to the encoders, IMU, torque sensors at a joint level, Force/Torque sensors on the wrists and ankles and temperature sensors of the robots.
Yes, the URDF includes CoM position, mass and inertia tensors. This model has been extracted from the CAD and it was validated by the full body inverse dynamics and torque control on the walking biped robot.