HUMANOID ROBOTS
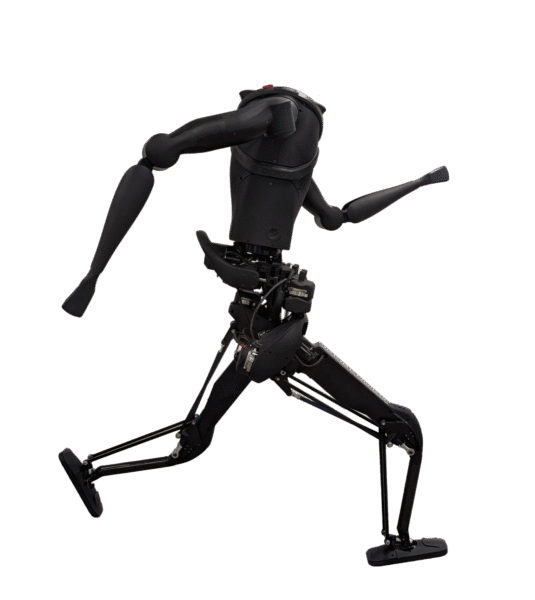
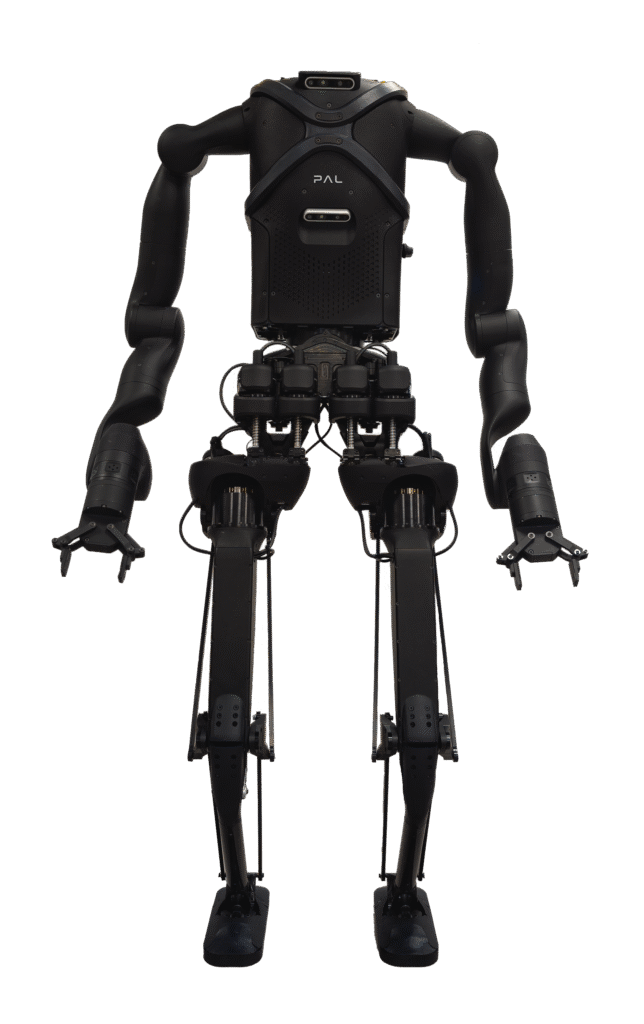
KANGAROO
Leap into the future of dynamic bipedal robotics and enhance your developments with unparalleled agility and efficiency.
KANGAROO
A Development-ready Humanoid
KANGAROO is a must for your research on dynamic locomotion, reinforcement learning and embodied AI . Customize KANGAROO to foster a deeper understanding and enable your breakthroughs in the science of robot learning and robotic movement, observing your developments and expanding your research.