LEGGED ROBOT
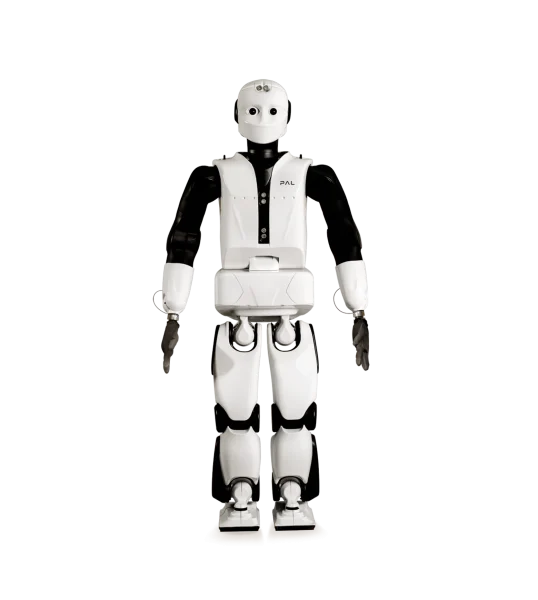
REEM-C
A research platform bringing sophisticated navigation, vision, and AI integration to life.

REEM-C
A robust biped robot platform
REEM-C is able to walk stably at a speed of up to 2.5 km/h, and can even climb stairs or sit on a chair. Provided with a large autonomy, it is the right biped robot to bring your research in robotics and Artificial Intelligence one step ahead.