
StockBot
Tracking Stock Made Easier

RFID Technology and Robotics
to optimise your inventory
Discover how we integrated RFID technology into our robotic solution StockBot to help retailers perfect their inventory management.
RFID Technology and Robotics
to optimise your inventory
Discover how we integrated RFID technology into our robotic solution StockBot to help retailers perfect their inventory management.
Highlights

Tracking
Find family of products, item position, movements and availability.

Optimise orders
Have more time to prepare your Click & Collect orders ready for customer collection

Delivery & Logistics
Optimise logistics and reduce the delivery time to refill required stock

Stock
Optimise stock by taking into account misplaced and lost items.

ROI
Increase profit per square metre of your store with accurate data

Customer Experience
Reduce customer frustration and enhance the shopping experience

Map Views
See the results of the inventory in 2D and 3D and clustering per product or family of products.
Components

UHF Tags
Tags are placed on all items in the store that are for sale. The tag stores information that is tracked by readers and antennas within the RFID robot.

RFID Readers
Transmit and receive modulated signals, complying with country regulations, in order to detect UHF passive tags.

RFID Antennas
Antennas are typically on the RFID robot’s sides with beams to detect tags and amplify the readers’ signals to improve tag detection and position accuracy.
How it works
The system used for item localisation in a retail store involves RFID tags that are read by two RFID readers, each connected to 4 antennas at each side of the robot.
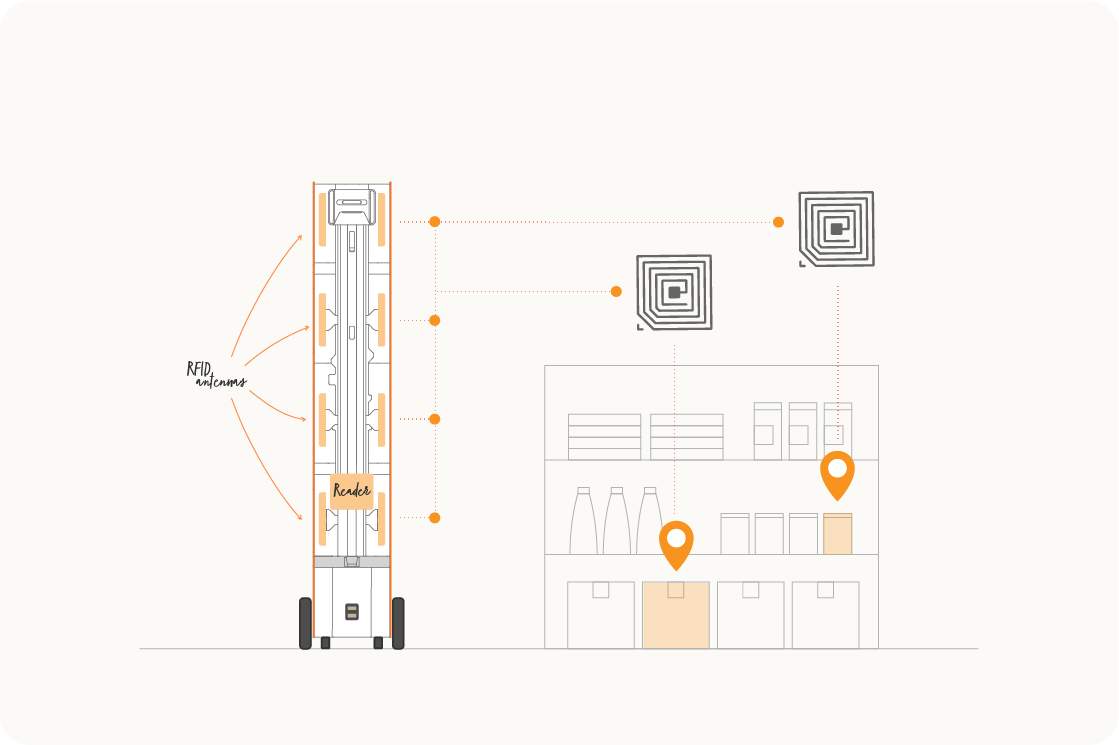

When the waves from the reader reach and activate a tag, the latter sends back a signal which encodes an Electronic Product Code (EPC) that uniquely identifies the item.
The signal is detected by the emitting antenna and the reader decodes the signal to get the EPC, and transmits this information along with the strength of the signal received to the robot’s computer using a Low-Level Reader Protocol (LLRP).
When the waves from the reader reach and activate a tag, the latter sends back a signal which encodes an Electronic Product Code (EPC) that uniquely identifies the item.
The signal is detected by the emitting antenna and the reader decodes the signal to get the EPC, and transmits this information along with the strength of the signal received to the robot’s computer using a Low-Level Reader Protocol (LLRP).
The computer estimates the distance of the tag with respect to the antenna based on the signal strength, i.e. the stronger the signal the closer the tag and the other way around.


As the robot keeps moving the same tag can be detected multiple times and combining the estimated distances a more accurate position can be calculated.
As the robot keeps moving the same tag can be detected multiple times and combining the estimated distances a more accurate position can be calculated.
