
A robust biped robot platform
REEM-C is able to walk stably at a speed of up to 2.5 km/h, and can even climb stairs or sit on a chair. Provided with a large autonomy, it is the right biped robot to bring your research in robotics and Artificial Intelligence one step ahead.


Wide Mobility
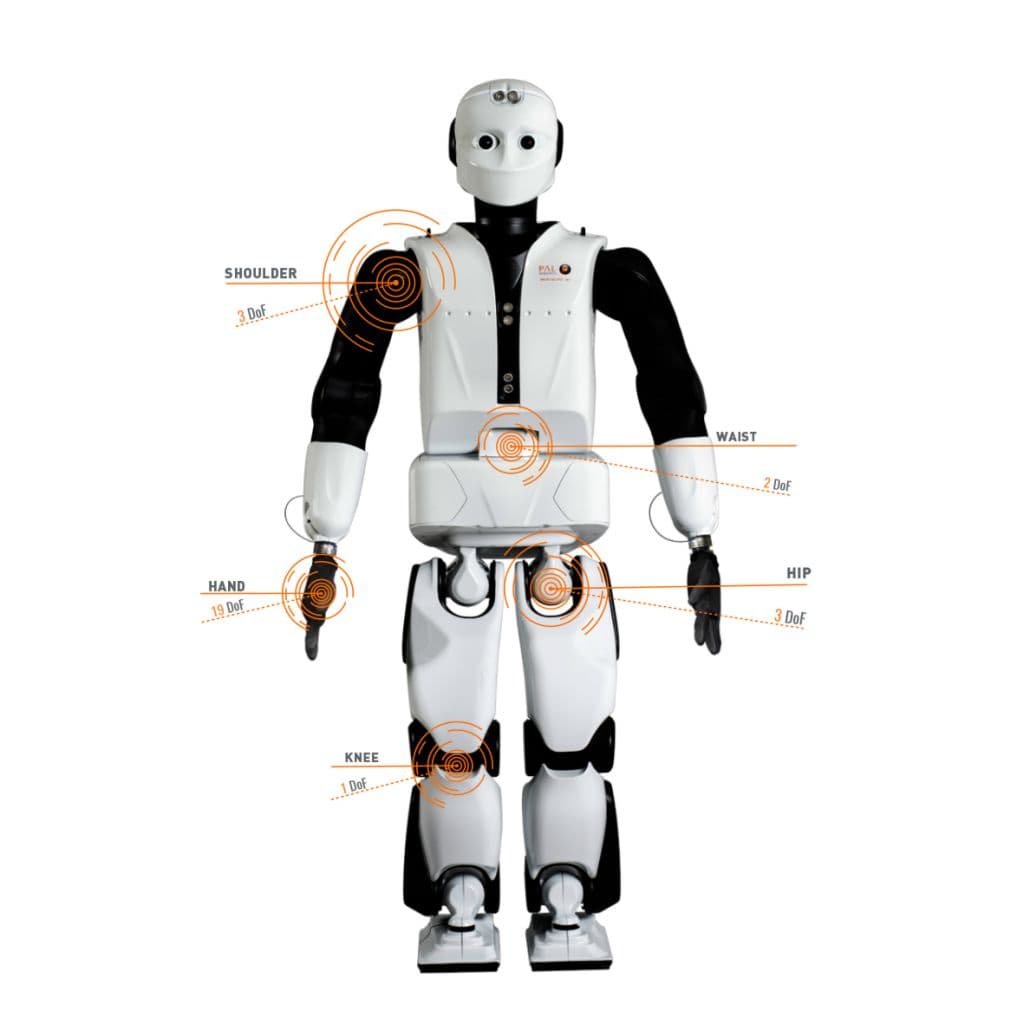
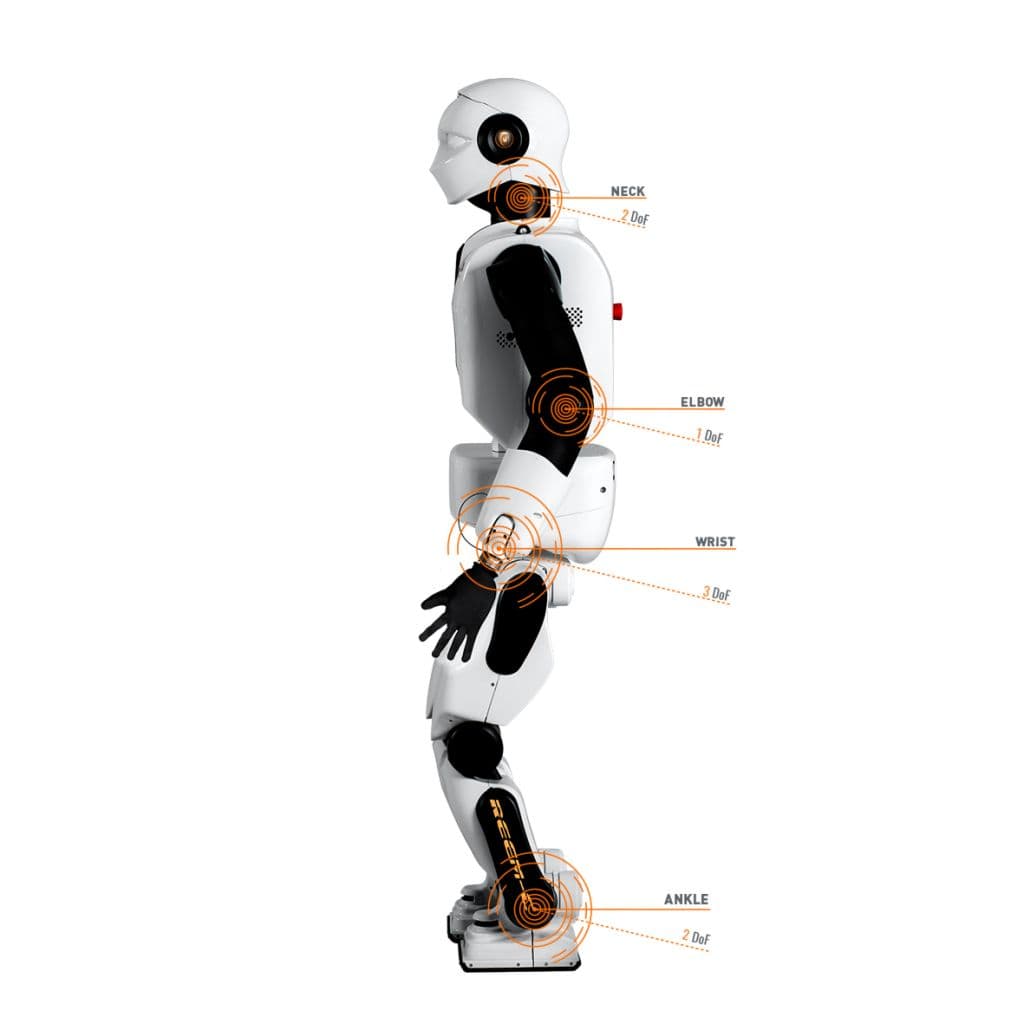
REEM-C is provided with 68 DoF that enable a wide set of movements inspired by the human motions. The humanoid robot’s F/T sensors, IMU, and RGB-D camera can help you smoothly implement and test your algorithms for the biped robot platform.
Wide Mobility
REEM-C is provided with 68 DoF that enable a wide set of movements inspired by the human motions. The humanoid’s F/T sensors, IMU, and RGB-D camera can help you smoothly implement and test your algorithms for your biped robot.
Out-of-the-box skills
REEM-C robot comes with a set of skills that work right out of the box, such as walking, grasping, Whole-Body Control or Text To Speech. The humanoid biped robot platform is fully ROS based, allowing to access its sensors and actuators from ros_control real time framework or visualize them in rviz.

Areas of use
USED FOR RESEARCH IN:
FIELDS OF APPLICATION:
Factory of the Future

Smart Cities and IoT
Ambient Assisted Living

Benchmarking

REEM-C IS USED IN…


Videos REEM-C in action
PAL Robotics proudly presents its new robotics research platform REEM-C. A fully ROS-based humanoid biped robot.
REEM-C biped robot using an application based on Whole Body Control (WBC). The humanoid robot developed by PAL Robotics as a robot research platform reacts to the force applied on its wrist, moving all its body in order to maintain the balance. Demonstration for exploitation of check SMCs. The EU-H2020 Project SocSMCs is supported by the European Commission. More information available on the page of the socSMCs Project.
REEM-C biped robot sitting on a chair and getting up. Shot at PAL Robotics on 01/04/2014.
REEM-C doing some body control exercises.
Watch REEM-C standing on one leg and keeping balance while it’s being pushed.
REEM-C biped robot from PAL Robotics makes a step when being pushed by an external force in order not to fall down.
REEM-C’s unboxing process.
Technical specifications
Contact PAL Robotics and get in touch with a team of experts
who can assess you and provide you with more information of REEM-C.
SPECS
| Height | 165 cm |
| Weight | 80 kg |
| Hand payload | 1 kg (arm stretched) |
| Battery autonomy | 3h walking / 6h stand by |
| OS | Ubuntu LTS, Real Time OS |
| F/T Sensors | In ankles and wrists |
OPEN SOURCE
Simulation model available at: wiki.ros.org/Robots/REEM-C

PREMIUM SOFTWARE
Speed your research with extra software: from Whole-Body Control
to navigation, HRI skills or teleoperation.
Citations
Research Projects of the Humanoid Robot Platform REEM-C
Frequently Asked Questions
At PAL Robotics we mostly use C++ and Python. As the REEM-C OS is a standard Ubuntu LTS, our customers can use other programming languages for their bipedal robot.
The humanoid robot has 2 onboard intel i7 computers, one for multimedia and the other for control. It is also possible to have an NVIDIA® Jetson™ TX2 module integrated into REEM-C if you need.
From a user point of view the Whole Body Control (WBC) software package enables easy and safe commanding of the end effectors of the bipedal robot by just specifying where you want it to be in real world coordinates.
The Whole Body Control software package is a quadratic hierarchical solver working at 200 Hz implemented by PAL Robotics providing on-line inverse kinematics of the whole humanoid robot. The solver is given a stack of tasks with different priorities. An example of stack of task is the following one:
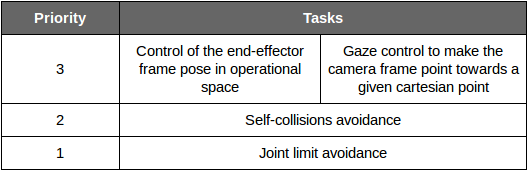
In this example, the Whole Body Controller is able to bring the end-effector to any desired pose in the cartesian space and to keep the gaze of the robot towards a desired point (this could be the user defined tasks) and the solutions to accomplish these lower priority tasks would always avoid joints limits and prevent self-collisions (these higher priority tasks would be included for safety).
Note that standard inverse kinematics solvers are not able to deal with joint limit and self-collisions avoidance, which are of key importance when commanding the robot.
You need a safety crane to hold the robot when switched off. You also need as many workstations as you wish to develop new algorithms and deploy them on the biped robot.
The REEM-C research robot can speak over 30 languages.
Contact PAL Robotics team if you have any further questions!
Subscribe to our Newsletter
 Register for PAL Robotics’s newsletter and stay up to date with product news, relevant events and exhibitions, and other relevant information about PAL Robotics.
Register for PAL Robotics’s newsletter and stay up to date with product news, relevant events and exhibitions, and other relevant information about PAL Robotics.