Nuestro Rol
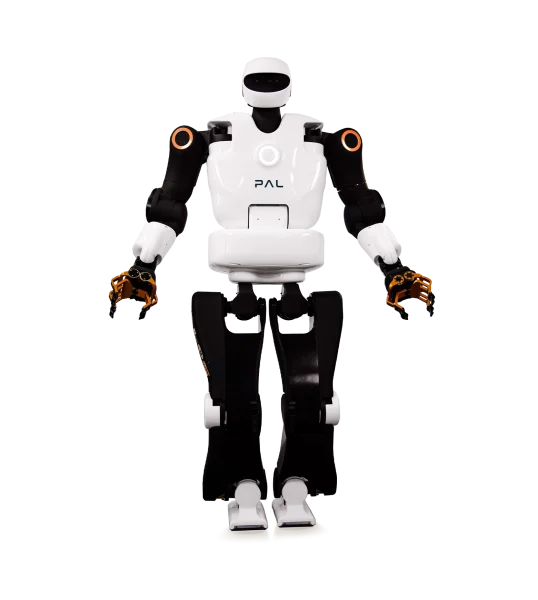
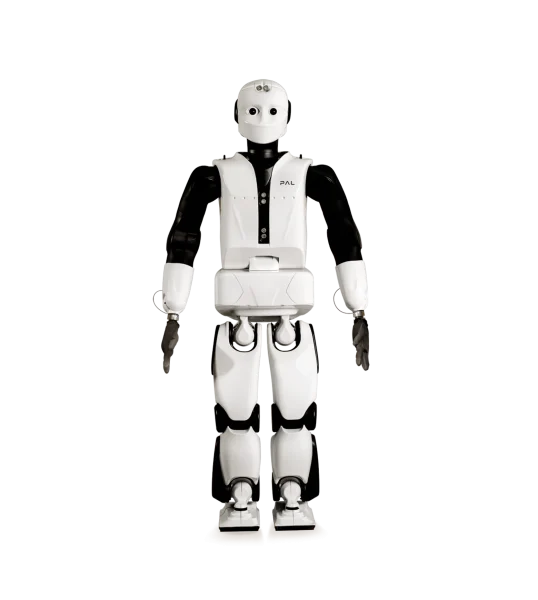
Los robots de PAL Robotics—TIAGo, TIAGo++, TALOS, REEM-C y la familia TIAGo Base—serán utilizados como Hardware Nominal a lo largo de la implementación de ros_control para ROS2. Estos robots demostrarán la efectividad práctica del sistema en aplicaciones del mundo real, mostrando la integración fluida de ros_control para un control de robots mejorado e interoperabilidad.
Responsabilidades clave
- Entregar una versión completamente funcional de ros_control adaptada al marco ROS2, asegurando un control estandarizado de robots a través de plataformas.
- Probar y validar la implementación de ros_control, asegurando su efectividad tanto con robots reales como simulados.
- Asegurar que bibliotecas como play_motion y MoveIt! sean compatibles con ROS2 desde el inicio, simplificando el control de robots para desarrolladores y fabricantes.
Robots Involucrados


Partners



