Nuestro Rol
PAL Robotics colaborará en el desarrollo de OpenWalker, un controlador de caminata estandarizado para robots humanoides. Ayudaremos a garantizar la adaptabilidad del controlador a diferentes plataformas humanoides implementando y probando la herramienta en nuestros robots. Esta colaboración tiene como objetivo entregar un marco de control eficiente, en tiempo real y bien documentado para robots humanoides.
Responsabilidades clave
- Crear módulos y plantillas adaptables para plataformas humanoides que faciliten su integración con ros_control.
- Contribuir al desarrollo de sistemas de control en tiempo real para controladores de caminata y equilibrio, principalmente utilizando C++ para mayor eficiencia.
- Asegurar que el marco esté bien documentado y sea fácil de usar, haciendo que la implementación y personalización de controladores de caminata sea accesible para la comunidad robótica.
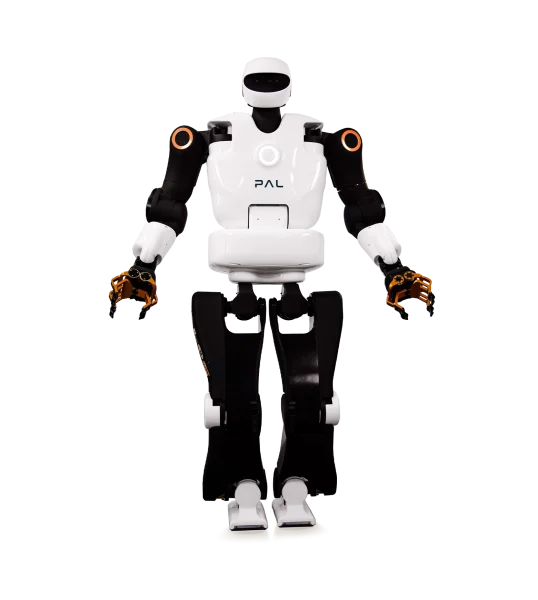
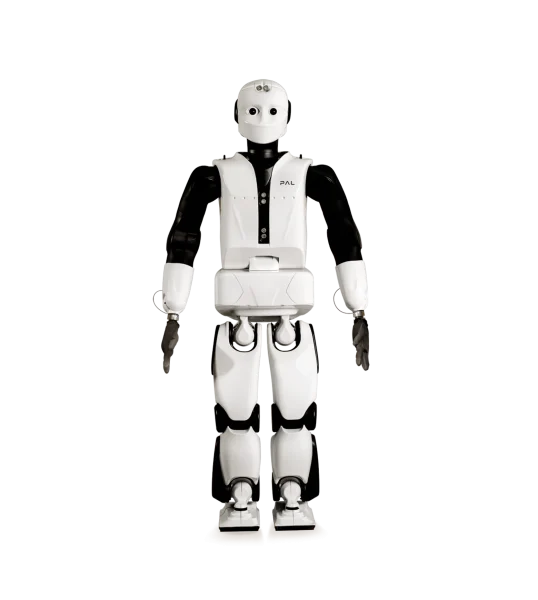
Robot Involucrado
Partners



