
From a user point of view the Whole Body Control software package enables easy and safe commanding of the end effectors of the robot by just specifying where you want it to be in real world coordinates.
The Whole Body Control software package is a quadratic hierarchical solver working at 200 Hz implemented by PAL Robotics providing on-line inverse kinematics of the whole robot body. The solver is given a stack of tasks with different priorities. An example of stack of task is the following one:
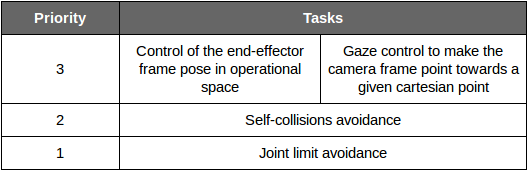
In this example, the Whole Body Controller is able to bring the end-effector to any desired pose in the cartesian space and to keep the gaze of the robot towards a desired point (this could be the user defined tasks) and the solutions to accomplish these lower priority tasks would always avoid joints limits and prevent self-collisions (these higher priority tasks would be included for safety).
Note that standard inverse kinematics solvers are not able to deal with joint limit and self-collisions avoidance, which are of key importance when commanding the robot.
Read all information in depth in the Whole Body Control page.