
Un robot bípedo robusto
REEM-C puede caminar de forma estable a una velocidad de hasta 2.5 km/h, e incluso puede subir escaleras o sentarse en una silla. Con una gran autonomía, es el robot bípedo adecuado para llevar tu investigación en robótica e Inteligencia Artificial a otro nivel.


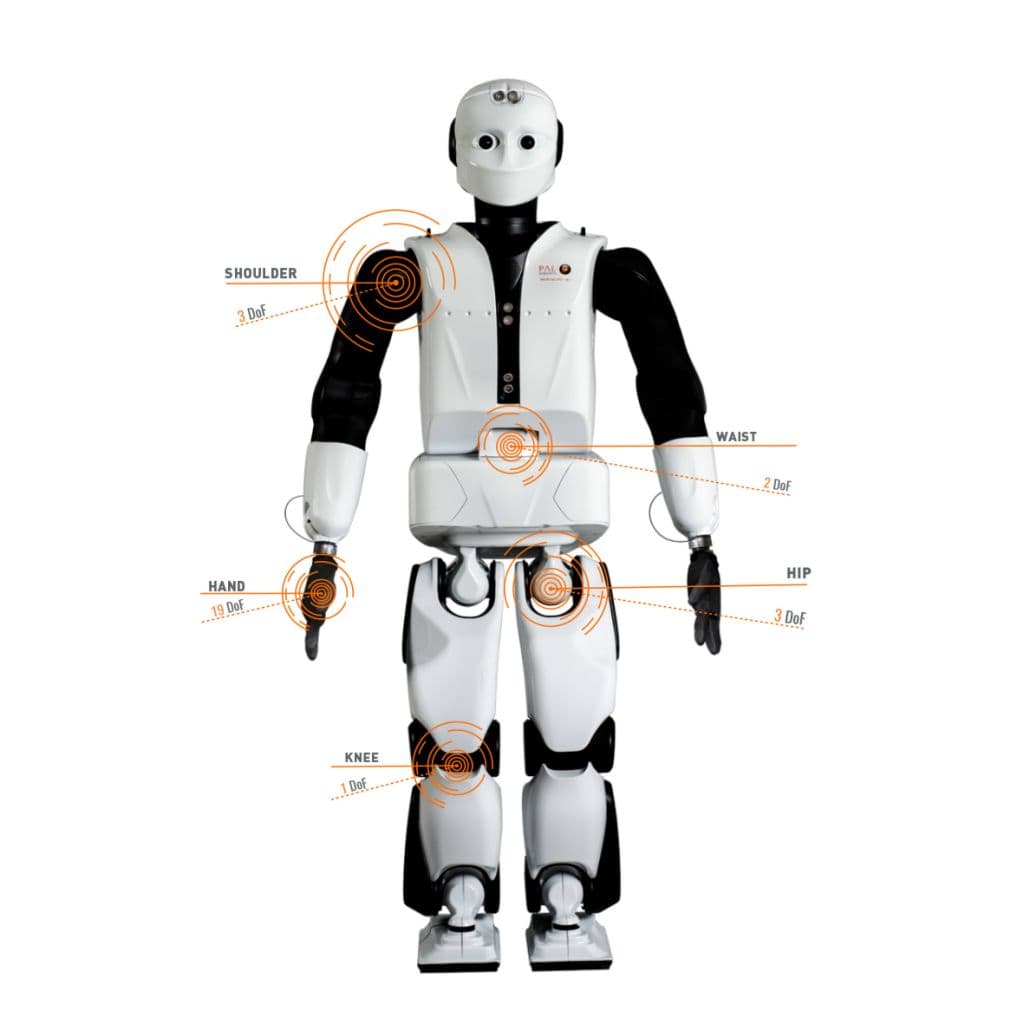
Plataforma bípeda con movilidad amplia
REEM-C cuenta con 68 Grados de libertad que permiten un amplio conjunto de movimientos inspirados en los movimientos humanos. Los sensores de F/T, IMU y la cámara RGB-D del robot humanoide pueden ayudarte a implementar y probar tus algoritmos fácilmente en esta plataforma bípeda.
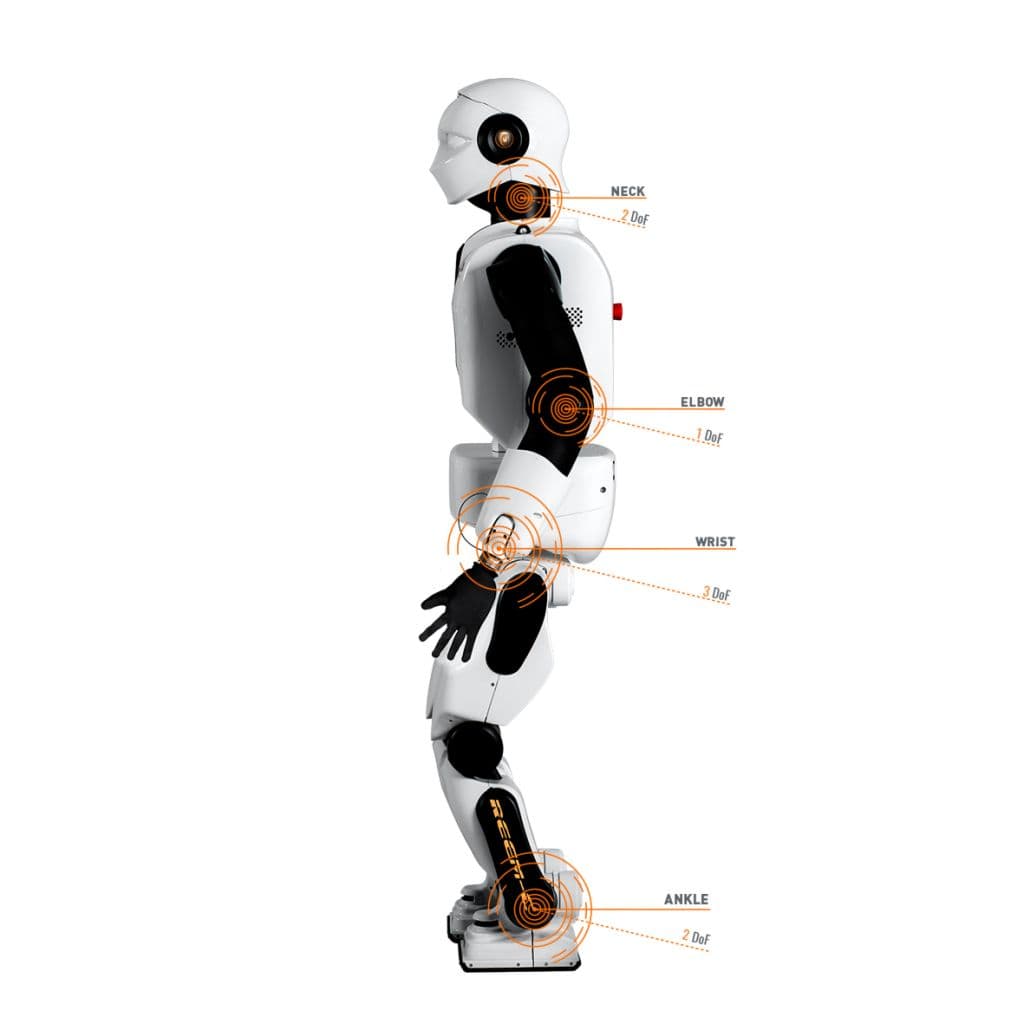
Plataforma bípeda con movilidad amplia
REEM-C cuenta con 68 Grados de libertad que permiten un amplio conjunto de movimientos inspirados en los movimientos humanos. Los sensores de F/T, IMU y la cámara RGB-D del robot humanoide pueden ayudarte a implementar y probar tus algoritmos fácilmente en esta plataforma bípeda.
Habilidades listas para usar
El robot bípedo REEM-C viene con un conjunto de habilidades que funcionan desde el primer momento, como caminar, manipular, Whole-Body Control o la aplicación Texto a voz. El robot humanoide está totalmente basado en ROS, lo que permite acceder a sus sensores y actuadores desde ros_control en tiempo real o visualizarlos en rviz.

Áreas de uso
IDEAL PARA INVESTIGACIONES EN:
CAMPOS DE USO:
Fábrica del Futuro

Smart Cities e IoT
Ambientes Asistidos

Benchmarking

REEM-C SE USA EN…


Videos en acción
PAL Robotics proudly presents its new robotics research platform REEM-C. ROS-based humanoid biped robot
REEM-C biped robot using an application based on Whole Body Control (WBC). The humanoid robot developed by PAL Robotics as a robot research platform reacts to the force applied on its wrist, moving all its body in order to maintain the balance. Demonstration for exploitation of check SMCs. The EU-H2020 Project SocSMCs is supported by the European Commission. More information available on the page of the socSMCs Project.
REEM-C sitting on a chair and getting up. Shot at PAL Robotics on 01/04/2014.
REEM-C doing some body control exercises.
Watch REEM-C standing on one leg and keeping balance while it’s being pushed.
REEM-C robot from PAL Robotics makes a step when being pushed by an external force in order not to fall down.
REEM-C’s unboxing process.
Especificaciones técnicas
Contáctanos y habla con nuestro equipo de expertos para que puedan asesorarte y proporcionarte más información sobre REEM-C.
ESPECIFICACIONES
| Altura | 165 cm |
| Peso | 80 kg |
| Carga | 1 kg (brazo estirado) |
| Autonomía | 3h caminando/ 6h stand by |
| OS | Ubuntu LTS, Real Time OS |
| Sensores F/T | En tobillos y muñecas |
SOFTWARE ABIERTO
Modelo de la simulación disponible en: wiki.ros.org/Robots/REEM-C

SOFTWARE PREMIUM
Acelera tu investigación con software adicional: desde Whole-Body Control
a navegación avanzada, habilidades HRI o teleoperación.
Menciones
Los proyectos de investigación de la plataforma robótica humanoide REEM-C
Preguntas Frecuentes
En PAL Robotics usamos principalmente C ++ y Python. Como el sistema operativo estándar de REEM-C es un Ubuntu LTS, nuestros clientes pueden usar otros lenguajes de programación.
El robot humanoide tiene 2 ordenadores Intel i7, uno para multimedia y otro para control. También es posible integrar en la plataforma bípeda un NVIDIA® Jetson ™ TX2 en REEM-C si es necesario.
Desde el punto de vista del usuario, el paquete de software Whole-Body Control permite controlar de manera fácil y segura los efectores finales del robot bípedo simplemente especificando dónde quieres que esté en las coordenadas del mundo real.
El paquete de software Whole-Body Control es un solucionador jerárquico cuadrático que funciona a 200 Hz implementado por PAL Robotics, y proporciona cinemática inversa en línea de todo el cuerpo del robot. El solucionador recibe una pila de tareas con diferentes prioridades. Un ejemplo de pila de tareas es el siguiente:
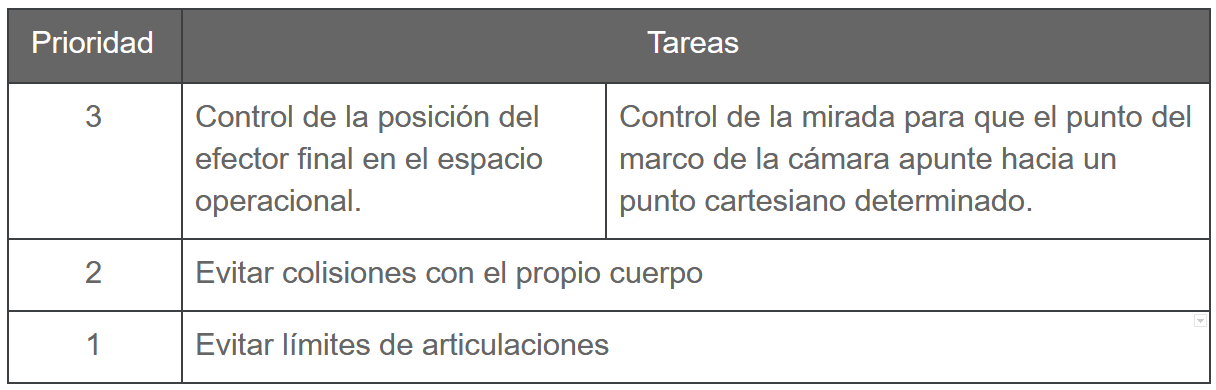
En este ejemplo, el Whole-Body Control puede llevar el efector final a cualquier postura deseada en el espacio cartesiano y mantener la mirada del robot hacia un punto deseado (esta podría ser la tarea definida por el usuario) y las soluciones para cumplir con estas tareas de menor prioridad siempre evitarían los límites de las articulaciones y evitarían las auto colisiones (estas tareas de mayor prioridad se incluirían por seguridad).
Hay que tener en cuenta que los solucionadores de cinemática inversa estándar no son capaces de lidiar con el límite de articulaciones y la prevención de auto colisiones, que son de importancia clave al comandar el robot.
Necesitas una grúa de seguridad para sostener el robot bípedo cuando está apagado. También necesita tantas estaciones de trabajo como desees para desarrollar nuevos algoritmos e instalarlos en la plataforma bípeda.
La plataforma bípeda REEM-C puede hablar más de 30 idiomas.
¡Contacta al equipo de PAL Robotics si tienes alguna pregunta!
Subscribe to Newsletter
 Register for PAL Robotics’s newsletter and stay up to date with product news, relevant events and exhibitions, and other relevant information about PAL Robotics.
Register for PAL Robotics’s newsletter and stay up to date with product news, relevant events and exhibitions, and other relevant information about PAL Robotics.