
F.A.Q.
El control de torque de TALOS tiene una baja latencia de 500-1000Hz.
Expresivo, servicial y entretenido, ARI te ayuda a diseñar las interacciones sociales que estás buscando. ARI ha sido creado como un robot autónomo, seguro e interactivo que puede ayudarte en actividades de cara al público. ARI conecta con tus clientes como recepcionista, guía, animador o presentador. Descubre más contactando a nuestro equipo aquí.
ARI es muy fácil de desplegar. Tiene una interfaz de usuario intuitiva que te ayuda a adaptar fácilmente el robot a tus necesidades. Si deseas saber más sobre cómo usar ARI en tu entorno, estaremos encantados de conocer tus necesidades y ayudarte. Puedes contactar a nuestro equipo a través del formulario de contacto y nos pondremos en contacto contigo en un día hábil, como máximo.
ARI se integra fácilmente con sistemas externos. ARI dispone de conexión WiFi y puede conectarse la infraestructura de red de tus instalaciones así como a servicios de la nube. Dispone de una API potente y extensiva la cual tanto integradores como usuarios finales pueden aprovechar para conectar el robot a miles de servicios diferentes.
La manera más fácil es poniéndote en contacto con nuestro equipo a través de nuestro formulario de contacto y te contactaremos en la mayor brevedad posible.
ARI puede hablar en más de 30 idiomas y esto es sólo el principio. Si necesitas algún idioma en concreto, por favor consúltanos para que podamos confirmarte si ARI lo habla.
Su interfaz web intuitiva y fácil de usar te permite alterar fácilmente el contenido de la pantalla táctil de ARI, su discurso y hasta crear sus propios gestos. De esta forma, nos aseguramos que las aplicaciones y el comportamiento de ARI puedan ser fácilmente controlados desde cualquier dispositivo, ya sea el ordenador, el móvil o una tablet.
Los movimientos, los discursos y el contenido de la pantalla táctil de ARI son fáciles de adaptar usando el SDK facilitado para satisfacer las necesidades de su aplicación. Los ojos de ARI también son personalizables para permitir mejores interacciones.
Hay varios temas disponibles para la pantalla táctil y el brillo es adaptable a diferentes condiciones de luz. En caso de necesitar una personalización para un número elevado de unidades, como por ejemplo, un color en particular, no dudes en decírnoslo y estaremos encantados de ayudarte.
ARI se adapta a la mayoría de entornos, por lo tanto, no necesitarás llevar a cabo ningún tipo de modificación en la mayoría de los casos.
ARI utiliza tecnología avanzada basada en múltiples sensores que permiten al robot interactuar y navegar de manera segura sin la necesidad de llevar a cabo modificaciones como, por ejemplo, guías o instalaciones complejas que otras plataformas tal vez necesiten.
ARan es una plataforma extremadamente versátil para la investigación, ya que cuenta con ROS, el middleware de robótica de código abierto, que proporciona acceso a todo el hardware a través de sus APIs y permite a los usuarios construir sobre los repositorios existentes o desplegar su propio software.
En cuanto al hardware, ARan incluye dos ruedas motoras con codificadores, un LiDAR, dos cámaras RGBD, una IMU y tanto una computadora estándar como una GPU de NVIDIA para aprovechar al máximo las capacidades del robot.
En términos de software, ARan es adecuado tanto para usuarios no expertos como para expertos en robótica. Ofrece un marco de programación visual intuitivo, impulsado por bloques de construcción de Navegación Avanzada y Planificador de Tareas Logísticas, además de contar con ROS y su amplio conjunto de herramientas de desarrollo, respaldado por una extensa comunidad de investigación.
Sí, es posible. ARan cuenta con puntos de montaje mecánicos y un panel de usuario que incluye suministro de energía y puertos de comunicación (Ethernet, USB, CAN, GPIO) para integrar fácilmente tus propios dispositivos o equipos en la parte superior del robot. Además, si se necesita una personalización más completa, el equipo de ingenieros de PAL Robotics está disponible para recopilar los requisitos y trabajar en ello.
¡Contáctanos para descubrir como personalizar tu ARan!
ARan está equipado con un LiDAR que permite un amplio campo de Visión (245º) y 2 cámaras RGBD que proporcionan datos detallados y potencia de cálculo tanto de CPU como de GPU para manejar este tipo de entornos. Además, ARan cuenta con un altavoz y tiras LED para sintetizar voz o emitir señales auditivas y luminosas que ayudan al robot a encontrar su camino en entornos con personas.
¡El cielo es el límite! Puedes integrar un brazo robótico utilizando los puntos de montaje mecánicos expuestos en ARan y los puertos de suministro de energía y comunicación expuestos en el panel de usuario. Tú decides cómo coordinar tanto la AMR, como el brazo y sacar el máximo provecho de su colaboración mutua.
¡Contáctanos para descubrir todas las oportunidades de personalización para ARan!
Sí, la parte inferior del robot ha sido diseñada para aislar la electrónica interna de las posibles trazas de agua en el suelo.
Por supuesto. Gracias a las opciones de conectividad inalámbrica disponibles en ARan, como WiFi 6 y Bluetooth 5.0, o bien mediante la conexión de emisores adicionales, es posible establecer comunicación con otros dispositivos o sistemas compatibles.
Sí, una de las cámaras RGBD está apuntando hacia el suelo para cumplir con estos objetivos de seguridad.
Si eres un usuario experto, probablemente utilizarás C++ o Python y usarás la API de ROS del robot o te enlazarás con sus bibliotecas. También puedes utilizar la API RESTful de ARan.
Si necesitas un nivel de entrada más sencillo, puedes utilizar el marco de programación visual basado en web que permite definir rápidamente comportamientos y tareas complejas.
La base móvil TIAGo Base es capaz de soportar un peso de 100 kg.
La velocidad máxima de TIAGo Base es de 1 m/s.
La base móvil TIAGo Base cuenta con una versión certificada por la industria que cumple con las regulaciones de la UE, es decir, el Marcado CE, de acuerdo con la Directiva de Máquinas 2006/42/EC, la Directiva de Bajo Voltaje 2014/35/UE y la Directiva EMC 2014/30/UE.
El robot cumple con las siguientes normas:
EN ISO 12100:2010. Seguridad de las máquinas — Principios generales para el diseño — Evaluación del riesgo y reducción del riesgo.
EN ISO 13849-1:2015 Seguridad de las máquinas — Partes de los sistemas de control relacionadas con la seguridad — Parte 1: Principios generales para el diseño.
EN 1037:1995+A1:2008 Seguridad de las máquinas. Prevención del arranque inesperado.
EN ISO 13482: 2014 Robots y dispositivos robóticos — Requisitos de seguridad para robots de atención personal.
ISO/TS 15066:2016. Robots y dispositivos robóticos – Robots colaborativos.
IEC 62133: Células secundarias y baterías que contienen electrolitos alcalinos u otros no ácidos – Requisitos de seguridad para células secundarias selladas portátiles de litio, y para baterías hechas a partir de ellas, para uso en aplicaciones portátiles – Parte 2: Sistemas de litio.
Y está siendo probado por un laboratorio certificado según las siguientes normas:
EN 61000-6-2:2017 Compatibilidad electromagnética (EMC) — Parte 6-2: Normas genéricas – Inmunidad para entornos industriales.
EN 61000-6-4:2017 Compatibilidad electromagnética (EMC) — Parte 6-4: Normas genéricas – Norma de emisión para entornos industriales.
EN 60204‐1:2006/A1:2009 Seguridad de las máquinas ‐ Equipamiento eléctrico de las máquinas ‐ Parte 1: Requisitos generales.
La pendiente máxima es de aproximadamente el 6% y depende del tipo de suelo y de la carga en el robot.
El escalón máximo transitable es de aproximadamente 1 cm.
Después de calibrar la odometría de las ruedas se obtienen los siguientes errores residuales:
| Error absoluto | % de error | |
|---|---|---|
| Movimiento hacia adelante de 1 m | 0.00513854 m | 0.51% |
| Rotación de 360º | 0.548° | 0.15% |
El movimiento omnidireccional permite que el robot navegue por espacios reducidos minimizando el número de maniobras, optimizando los flujos de trabajo logísticos y minimizando incidentes.
Contáctanos para descubrir como aprovechar de todas las ventajas de TIAGo OMNI Base para tu entorno.
TIAGo OMNI Base ofrece varios accesorios, el robot se puede personalizar para adaptarse a tus requisitos operativos y empresariales. Contáctanos para descubrir más sobre las oportunidades de integración de nuestra base móvil.
La cámara adicional mejora la percepción espacial, mejorando el reconocimiento de objetos y la navegación.
Sí, TIAGo OMNI Base puede integrarse fácilmente con los sistemas ERP existentes para operaciones optimizadas. Contáctanos para saber más!
TIAGo OMNI Base es ideal para la investigación en navegación gracias al movimiento omnidireccional, su capacidad de carga, las capacidades computacionales, su integración 100% con ROS y sensores avanzados que permiten el desarrollo y la prueba de algoritmos de navegación.
TIAGo OMNI Base está equipado para navegar en entornos cambiantes y adaptarse a los obstáculos en tiempo real, gracias a sus dos sensores LiDARs y la cámara RGB-D que le otorgan un campo de visión de 360º.
Gracias a sus ruedas de alta tracción omnidireccionales, TIAGo OMNI Base puede transitar superficies irregulares sin comprometer su estabilidad.
TIAGo OMNI Base destaca en entornos industriales, de salud, hostelería y oficinas debido a su versatilidad y capacidad de adaptación. Contáctanos para descubrir como nuestro robot móvil autónomo (AMR) se adapta fácilmente a todas tus necesidades operativas y de negocios.
El paquete básico está formado por el robot con sensores estándar y el software para navegación autónoma, basado en ROS al 100%. También se proporciona la simulación del robot en Gazebo junto con su gemelo digital en Rviz.
Escríbenos para saber más!
El software proporciona capacidades de mapeo, localización y navegación mejoradas (Obstáculos Virtuales, Puntos y Zonas de Interés, Soporte de Autopistas y Rampas), utilizando el máximo potencial de los sensores del robot.
TIAGo OMNI Base puede operar continuamente, gracias a sus características para gestionar la vida útil de la batería y la capacidad para programas tareas de forma ininterrumpida.
Sí, su navegación precisa y diseño que lo hacen adecuado para entornos sensibles como centros de salud y laboratorios.
TIAGo OMNI Base utiliza LiDARs y cámaras para la detección de obstáculos en tiempo real y la navegación.
Se proporciona formación completa y soporte técnico en línea para garantizar una operación e integración sin problemas.
Contáctanos para saber más sobre nuestro paquete de asistencia y suporte.
TIAGo OMNI Base mejora la eficiencia, reduce los costes operativos y mejora la maniobrabilidad en intralogística. Contáctanos para descubrir como vamos a automatizar y mejorar tu logística y almacén.
El que esté diseñado para ser configurado y gestionado rápidamente a través de la interfaz webGUI y el paquete de Programación Visual para usuarios no técnicos.
La alta tracción garantiza la operatividad del robot en diferentes superficies, manteniendo el rendimiento en diversas condiciones ambientales.
El paquete premium de «Programación Visual basada en Web» es una característica avanzada que permite a los usuarios programar y personalizar las tareas y comportamientos de TIAGo OMNI Base sin la necesidad de codificación tradicional. A través de una interfaz web intuitiva, los usuarios pueden arrastrar y soltar bloques predefinidos para crear flujos de trabajo complejos, facilitando la adaptación de las funciones del robot a necesidades específicas, mejorando la eficiencia y la experiencia de usuario.
Contáctanos para saber más sobre nuestros paquetes premium.
Proporcionamos una estimación de estado a partir de la IMU+cinemática desde el primer momento, un sistema para fusionar esta odometría con mediciones externas adicionales debe abordarse con un estimador adicional del bucle ros_control en tiempo real. Esto sería más seguro para el control de torque de todo el cuerpo que se basa en la estimación de CoM.
En PAL Robotics usamos principalmente C ++ y Python. Como el sistema operativo estándar de REEM-C es un Ubuntu LTS, nuestros clientes pueden usar otros lenguajes de programación.
Proporcionamos un API RESTful a los integradores y usuarios finales para poder integrar fácilmente nuestros AMRs (Robot Móvil Autónomo) en tu ERP o el sistema interno de tu negocio. De esta manera, puedes dar órdenes a tu flota de TIAGo Base desde el mismo software que utilizas para tener tu negocio bajo control.
Si tiene más preguntas sobre la automatización de la logística y la integración software, ¡contáctanos!
- Se crea un mapa del entorno.
- Las áreas de inventario se definen a través de la interfaz web.
- El número deseado de inventarios se programa en la interfaz web.
- A partir de ahí, StockBot realizará de forma autónoma los inventarios de acuerdo con la configuración establecida.
El robot tiene una garantía de 1 año en hardware. Se ofrecen como opción adicional, una extensión de 12 meses de la garantía.
A través de ros_control, tiene acceso a los codificadores, IMU y sensores de temperatura de los robots.
El robot humanoide tiene 2 ordenadores Intel i7, uno para multimedia y otro para control. También es posible integrar un NVIDIA® Jetson ™ TX2 en REEM-C si es necesario.
¡Por supuesto! Contáctanos y diseñaremos una prueba de concepto para que primero puedas probar los robots móviles en tu propia casa. ¡Comprueba por ti mismo las ventajas de tener TIAGo Base y cómo te ayudan a aumentar tu productividad!
Conocer la ubicación de tus productos te brinda un conocimiento exhaustivo del rendimiento de tu tienda y te da la información que necesitas para mejorarla. Con los datos de StockBot, cada día puedes:
- Detectar productos mal colocados.
- Detectar la falta de stock o existencias.
- Analizar la efectividad de la distribución de sus productos.
- Tomar decisiones basadas en datos fiables.
- Verificar la distribución de las tapas finales (con el StockBot que usa cámaras de visión).
- Habilitar la verificación de planograma con la configuración de StockBot que usa cámaras de visión.
- …¡Y mucho más!
¡Contáctanos para poder asesorarte y aprovechar al máximo las posibilidades de tu tienda!
TIAGo viene con un idioma y una voz que puede seleccionarse de esta lista. Se pueden añadir idiomas o voces adicionales bajo petición del cliente.
Sí, el URDF incluye posición de CoM, tensores de masa e inercia. Este modelo se ha extraído del CAD y fue validado por la dinámica inversa de todo el cuerpo y el control de torque en el robot.
Desde el punto de vista del usuario, el paquete de software Whole-Body Control permite controlar de manera fácil y segura los efectores finales del robot simplemente especificando dónde quieres que esté en las coordenadas del mundo real.
El paquete de software Whole-Body Control es un solucionador jerárquico cuadrático que funciona a 200 Hz implementado por PAL Robotics, y proporciona cinemática inversa en línea de todo el cuerpo del robot. El solucionador recibe una pila de tareas con diferentes prioridades. Un ejemplo de pila de tareas es el siguiente:
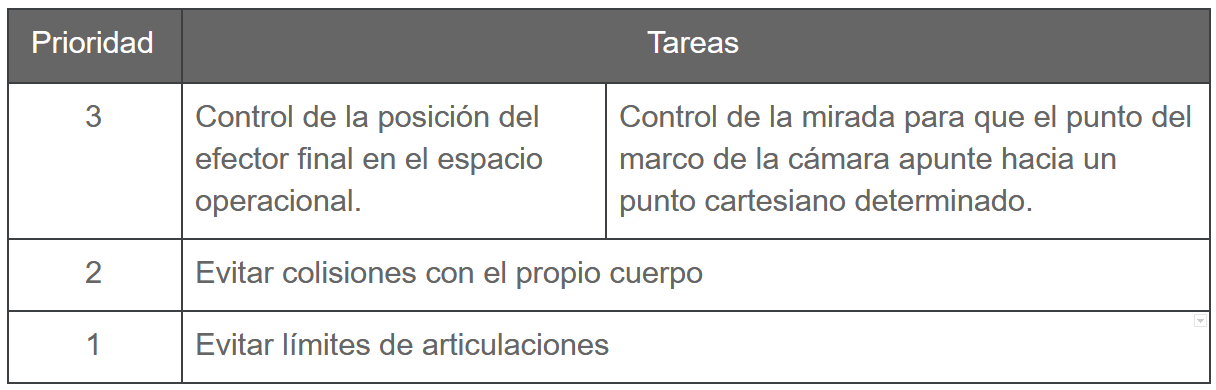
En este ejemplo, el Whole-Body Control puede llevar el efector final a cualquier postura deseada en el espacio cartesiano y mantener la mirada del robot hacia un punto deseado (esta podría ser la tarea definida por el usuario) y las soluciones para cumplir con estas tareas de menor prioridad siempre evitarían los límites de las articulaciones y evitarían las auto colisiones (estas tareas de mayor prioridad se incluirían por seguridad).
Hay que tener en cuenta que los solucionadores de cinemática inversa estándar no son capaces de lidiar con el límite de articulaciones y la prevención de auto colisiones, que son de importancia clave al comandar el robot.
Puedes elegir la opción que mejor se adapte a tus necesidades:
- Utiliza nuestra interfaz web, intuitiva, compatible con múltiples dispositivos (tablet, ordenador, móvil, etc.).
- Integra nuestros AMRs con tu ERP o sistema de gestión interno. Podemos proporcionarte a ti o a tu integrador una API REST para una integración directa.
¡Todo listo para empezar a beneficiarte de TIAGo Base!
¡Por supuesto! StockBot se diseñó para adaptarse a todo lo que sucede dentro de una tienda. Hacer inventario mientras la tienda está abierta, con gente alrededor, es como StockBot suele funcionar. Su avanzado sistema de navegación permite al robot detectar a cualquier persona que se encuentre alrededor, o actualizar su mapa si se modifica la distribución del mobiliario.
Ponte en contacto con nosotros para obtener más información.
Necesitas una grúa de seguridad para sostener el robot cuando está apagado. También necesita tantas estaciones de trabajo como desees para desarrollar nuevos algoritmos e instalarlos en el robot.
¡Por supuesto! Incluso puedes combinar diversas configuraciones de TIAGo Base dentro de tu flota según tus necesidades. Proporcionamos un Software de Control de Flotas para que puedas asignar tareas, optimizar rutas, realizar control de tráfico y habilitar analíticas. ¡Pregúntanos si quieres más detalles o si tienes alguna petición especial!
StockBot se instala en tus instalaciones en un solo día, en el cual nuestro equipo mapea el área de la tienda e integra el robot en el sistema de inventario de tu tienda. A continuación, puedes definir fácilmente las áreas de interés y las áreas prohibidas de forma intuitiva con la interfaz de usuario web. ¡Así de simple!
PAL Robotics desarrolla plataformas de investigación desde 2004. Sus principales desarrollos incluyen los robots humanoides REEM y REEM-C; TIAGo hereda así toda la tecnología y solidez resultante de años de desarrollo y uso extensivo de robots. PAL Robotics diseña toda la mecánica y electrónica de sus robots de manera modular, integrando componentes de alta calidad tales como reductores Harmonic Drive en los motores de los brazos, así como el bus CAN para la comunicación entre componentes electrónicos. El bus CAN es más robusto que otros como el RS-485, ya que incluye la capa de enlace de datos del modelo OSI y maneja mejores fallas y colisiones.
PAL Robotics ofrece más que simplemente una plataforma hardware. Nuestra empresa integra todo su software en ROS desde 2011. Se proporcionan bloques de construcción de software y documentación comprensible para los clientes con tal de que puedan empezar a trabajar con robots y obtener resultados en un corto plazo de tiempo. Además, para aquellos que buscan acceso al hardware de bajo nivel, ofrecemos soporte para hacerlo. Se proporcionan paquetes de software que incluyen navegación autónoma, percepción, manipulación y HRI. Con tal de ampliar la vida útil de nuestro robots, ofrecemos opciones de garantías extensibles y planes de mantenimiento.
El robot REEM-C puede hablar más de 30 idiomas.
Sí, puedes programar a TIAGo Base para trabajar las horas que tu empresa necesita. Una vez haya realizado todas las tareas asignadas, TIAGo Base regresará a su estación de carga y se recargará mientras espera una nueva orden.
Si el robot móvil se queda sin batería en medio de una tarea, nuestro Software de Control de Flotas puede enviar de forma autónoma otra TIAGo Base para que la finalice, asegurando un flujo de producción constante.
Háznos saber cuántas entregas necesitas en tu línea de producción, tu almacén o tu empresa, y te daremos detalles precisos según tu caso de uso.
Una vez completado cada inventario, StockBot vuelve a su estación de carga de forma autónoma, donde espera hasta el próximo inventario. El robot puede funcionar hasta 12 horas seguidas, y se recarga completamente en 4 horas.
Dependiendo de la actividad, el robot dispone de una autonomía de unas 4-5 horas con una batería y de unas 6-10 horas con dos baterías.
Puede dejar su espacio tal y como está, TIAGo Base no necesita ninguna guía, raíl ni otros requisitos a instalar para navegar y realizar las entregas de manera autónoma y segura.
TIAGo Base es un Robot Móvil Autónomo (AMR) y utiliza un conjunto avanzado de sensores y software para navegar de forma segura sin seguir ninguna guía. Este es un gran salto respecto a los AGVs tradicionales.
StockBot localiza productos con una precisión de 0.5 m.
Todas las articulaciones tienen codificadores incrementales del lado del motor y absolutos del lado del enlace.
Puedes usar Wi-Fi o cualquier otra tecnología inalámbrica que necesites. Ponte en contacto con nosotros para saber más detalles.
Integramos la información generada por el robot en tu sistema ERP, adaptándonos a cualquier API.
Los módulos del brazo tiene codificadores absolutos 12-bit y reductores Harmonic Drive de alta calidad con 0 contragolpes y baja fricción, que proporciona una precisión de 0.087º.
El tipo de RFID que usa el robot es el siguiente: EPC global UHF Clase 1 Gen 2 / ISO 18000-6C.
La mano hey5 se desenvuelve mejor en tareas de interacción humano-robot como sacudir la mano y agarrar objetos deformables.
TIAGo usa la plataforma móvil TIAGo Base. Puedes adquirir primero un TIAGo Base y posteriormente solicitar a PAL Robotics que la convierta en cualquier otra configuración de robot TIAGo. Puedes ver todas las opciones de configuración en el TIAGo robot builder o en el TIAGo Datasheet.
Puedes ver vídeos de TIAGo en acción a través de la siguiente lista de reproducción de YouTube. Aquí encontrarás vídeos donde TIAGo es usado en diferentes proyectos de investigación, competiciones de robótica o demostrando características específicas. ¡Disfuta!
Hay dos formas posibles de integrar un efector final de un tercero:
- Integración de un efector final de CANopen: la muñeca expone un conector de bus CAN y PAL Robotics proporciona los dibujos de la parte de montaje. Luego, el cliente puede diseñar la parte mecánica requerida para unir el efector final a la muñeca y conectarse al bus.
- Integración de un efector final usando otro bus de comunicación: en este caso, el cliente puede diseñar la parte mecánica para unir el efector final a la muñeca y usar cableado externo para conectarse a uno de los puertos provistos en el panel de usuario de la bandeja del portátil (es decir, 1x USB 2.0, 1x USB 3.0 y 2x puertos GigE ) y la fuente de alimentación (12 V, 5 A).
Además, PAL Robotics ofrece servicios de personalización e integración para ayudar al cliente a integrar otros efectores finales.
Sí. Tanto el gripper paralelo como la mano de 5 dedos (Hey5) pueden detectar cuando un objeto es agarrado monitorizando el consumo de corriente de sus motores. Además, la mano Hey5 está poco activada, tiene 19 grados de libertad y 3 motores, por lo que se adapta a la forma de los objetos. Gracias al sensor de fuerza/par de 6 ejes en la muñeca, las fuerzas y los movimientos en las tareas de manipulación pueden ser controlados con precisión.
El controlador del robot está todo escrito como componentes.
La arquitectura ros_control brinda un acceso fácil al hardware mediante interfaces ROS estándar. La interfaz para el hardware del robot son puertos Orocos simples que tienen tipos de mensajes vectoriales correspondientes a cada articulación, para ordenar la posición, velocidad, corriente o leer los valores mencionados. Si no deseas utilizar ros_control, siempre puedes conectar directamente a estos puertos.
Desde el punto de vista del usuario, el software del Whole Body Control permite un comando fácil y seguro del efector final del robot, simplemente especificando dónde desea que esté en las coordenadas del mundo real.
El paquete de software de Whole Body Control es un solucionador jerárquico cuadrático que funciona a 100 Hz, implementado por PAL Robotics y que proporciona cinemática inversa en línea de todo el cuerpo superior del robot (7 brazos DoF, 2 cabezas DoF y articulación prismática del torso). El solucionador recibe una pila de tareas con diferentes prioridades. Un ejemplo de pila de tareas es el siguiente:
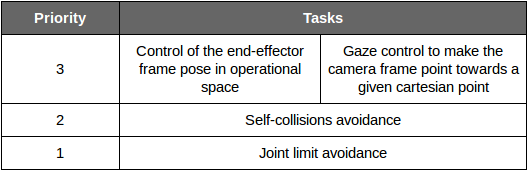
En este ejemplo, el controlador de cuerpo entero es capaz de llevar el efector final a cualquier pose deseada en el espacio cartesiano y mantener la mirada del robot hacia un punto deseado (esto podría ser las tareas definidas por el usuario) y las soluciones para lograr estas tareas de menor prioridad siempre evitarían los límites de las articulaciones y evitarían colisiones automáticas (estas tareas de mayor prioridad se incluirían por seguridad).
Ten en cuenta que los solucionadores de cinemática inversa estándar no son capaces de lidiar con el límite de unión y con la evitación de auto colisiones, que son de fundamentales cuando se ordena al robot.
Integramos un sensor de fuerza/par 6-axis ATI mini-45 .
Sí. Gracias al actual control de par sin sensor, está opción está prevista con el robot de forma gratuita. Además, se implementa un interruptor de control en línea, que permite al usuario cambiar entre diferentes modos de control al instante.
Sí. Concretamente, se proporciona una API de control de esfuerzo.
Sí. El cumplimiento en el brazo de TIAGo se logra mediante el uso de dos mecanismos:
- Control de par sin sensor: se ordenan las referencias de par de bucle abierto. Esto se basa en el control de la corriente de avance que se logra gracias al modelo preciso de la dinámica del brazo; incluyendo la mecánica, el cableado y las cubiertas de la electrónica y la baja fricción de las juntas. Esto da como resultado un control de fuerza altamente aceptable en el espacio operativo.
- Control de admisión: utilizando los datos del sensor de fuerza/par de la muñeca, se pueden ordenar las posiciones teniendo en cuenta las fuerzas externas para obtener resultados aún mejores que cuando se usa el control de par sin sensor.
Sí. El usuario solo necesita crear extensiones de ros_control para implementar nuevos controladores y agregarlos al ros_controllers o reemplazar los deseados. Los nuevos controladores se ejecutarán en tiempo real en el bucle de control y tendrán acceso a las interfaces completas de hardware del robot expuestas por ros_control.
Los diferentes motores del robot pueden ser controlados usando interfaces ROS. Todos los controladores ofrecidos son implementados como extensiones de ros_control y se almacenan en ros_controllers. Todos los controladores se ejecutan en el bucle de control en tiempo real y tienen acceso a las interfaces completas de hardware del robot expuestas por ros_control. Los motores de TIAGo se pueden controlar de los siguientes modos:
- Las ruedas de la base móvil se pueden controlar a través del modo de velocidad.
- El motor del torso de elevación y los dos motores de la cabeza se pueden controlar con el modo de posición.
- Por último, los motores del brazo se pueden controlar con los modos de posición y de esfuerzo.
El brazo modula a una velocidad máxima de 100º/s.
El brazo de TIAGo está compuesto de los siguientes motores:
- Modulos 4 x M90. Estos módulos de eje hueco autónomos contienen motores de DC sin escobillas con codificadores absolutos, electrónica de potencia y control integrada y reducciones de accionamiento armónico. El firmware de las placas electrónicas implementa PID de control para posición, velocidad y par.
- 1x muñeca M3D con 3 DoF de 3 motores DC cepillados con codificadores absolutos y placas electrónicas personalizadas. La electrónica integrada proporciona PID de control para la posición y la velocidad.
Todos los actuadores del brazo usan un bus CAN para las comunicaciones. Además, los módulos y la muñeca incluyen una amplia variedad de mecanismos de autoprotección (sobretemperatura, sobrecorriente, subtensión, sobretensión, …).
Sí, ofrecemos diferentes posibilidades de actualización, de tal forma que podrías enviarnos tu plataforma cuando desees y nosotros la convertiríamos en otra configuración TIAGo.
Tenemos un largo historial trabajando con universidades y entendemos que parte del presupuesto puede estar disponible en diferentes momentos, por lo que nos adaptamos a la situación y ofrecemos actualizaciones de tu TIAGo Base o TIAGo después de que la hayas adquirido.
Sí, por favor contacta a nuestro equipo a través de tiago@pal-robotics.com y te ayudaremos con tu compra.
Sí, hemos ido aún más lejos y hemos incluido el descuento universitario en el precio de TIAGo, por lo que estamos ofreciendo precios universitarios para esta plataforma.
TIAGo tiene un bus CAN de comunicación entre los componentes electrónicos. El bus CAN es más robusto que otros buses como el RS-485, ya que incluye la capa de enlace de datos del modelo OSI y maneja mejores fallas y colisiones.
Sí. Ambos usan el mismo conector de montaje y la misma interfaz. El proceso para intercambiar los efectores finales en TIAGo es muy fácil y rápido.
Sí, la simulación de TIAGo es de código abierto y está disponible para cualquiera. Para poder usar el modelo de simulación público para Gazebo, sigue las instrucciones en http://wiki.ros.org/Robots/TIAGo.
Hacemos un gran esfuerzo para mantener nuestros simuladores actualizados y trabajando con precisión, permitiendo una muy fácil transición de la simulación al robot.
 ¿Tienes alguna otra pregunta o duda? ¡Nos complacerá aclarar lo que desees saber!
¿Tienes alguna otra pregunta o duda? ¡Nos complacerá aclarar lo que desees saber!