
Desde el punto de vista del usuario, el paquete de software Whole-Body Control permite controlar de manera fácil y segura los efectores finales del robot simplemente especificando dónde quieres que esté en las coordenadas del mundo real.
El paquete de software Whole-Body Control es un solucionador jerárquico cuadrático que funciona a 200 Hz implementado por PAL Robotics, y proporciona cinemática inversa en línea de todo el cuerpo del robot. El solucionador recibe una pila de tareas con diferentes prioridades. Un ejemplo de pila de tareas es el siguiente:
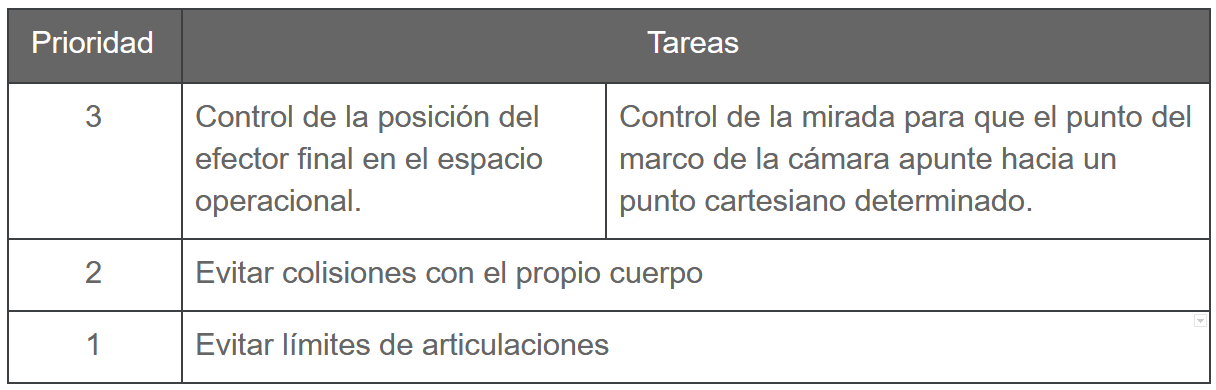
En este ejemplo, el Whole-Body Control puede llevar el efector final a cualquier postura deseada en el espacio cartesiano y mantener la mirada del robot hacia un punto deseado (esta podría ser la tarea definida por el usuario) y las soluciones para cumplir con estas tareas de menor prioridad siempre evitarían los límites de las articulaciones y evitarían las auto colisiones (estas tareas de mayor prioridad se incluirían por seguridad).
Hay que tener en cuenta que los solucionadores de cinemática inversa estándar no son capaces de lidiar con el límite de articulaciones y la prevención de auto colisiones, que son de importancia clave al comandar el robot.